How to Determine Which Laser Scanning Registration Method is Right for You




Which is the Best Choice?
Let’s do a mini quiz section where we try and figure out which registration method is the best choice for the environment. The figure below shows a substation. What are your thoughts on the best registration method for a steel- and powerline-filled environment such as this?

Credit: FARO webinar
An example of a substation, where cloud-to-cloud based registration was used.
The answer is cloud-to-cloud. It was a good choice and worked well because the accuracy required wasn’t the highest. Remember: the accuracy of the project is crucial.
What about in an office building, with a focus on the interior space? Cloud-to-cloud will only work in a situation such as this if you’re scanning in the doorways in order to ensure you’re getting enough overlap on the scans.
What do you think about the figure below? What’s the best registration method for a railway scan, where the client wants to compare rails scans every week and monitor movement?

Credit: FARO webinar
An example of a railway, where target-based registration was used.
The answer would be target-based registration using spheres. This is because the highest accuracy possible is required as this is a rail monitoring project. Targets in the form of spheres and survey control (our next section) are necessary, as each week, subsequent scans need to be georeferenced to the baseline scans to monitor any changes.
What about on an asphalt-paved street? Is target-based the right option, or is cloud-to-cloud the reliable bet? In this case, cloud-to-cloud will work, but its accuracy on asphalt isn’t good enough. Asphalt is the most important feature in these scans for surface and grade extraction, so targets need to be used. They also need to be used in order to move scans to survey control.
Survey Control
Now that we’ve mentioned it a few times, we need to talk about survey control. Survey control is essentially aligning scans using a model like a BIM model or aligning them to a state or known coordinate system. Geographic positions are specified relative to a fixed reference. An example would be positions on the globe specified in terms of angles related to the center of the Earth. Land surveyors measure horizontal positions in geographic or plane coordinate systems relative to previously surveyed positions called control points. According to the National Oceanic and Atmospheric Administration (NOAA), in the U.S., the National Geodetic Survey (NGS) maintains a National Spatial Reference System (NSRS) that consists of approximately 1,500,000 survey marks or control stations. Once a control network is established, surveyors use instruments, such as laser scanners, to measure angles and distances between locations and to ensure that their positional coordinates are compatible with those determined by others.
Control surveys establish a common, consistent network of physical points that are the basis for controlling the horizontal and vertical positions of projects, such as highways and facilities. Project control surveys provide consistent and accurate control for all subsequent project surveys, including LiDAR mapping, topography, land and property surveys, right-of-way surveys, and more.
To ensure continuity of projects, it is important to register those survey points to a mathematical representation of the topography. All spatial objects must be maintained in a common coordinate system, meaning, they must be tied to control points with geodetic or state ground coordinates. Arbitrarily setting monuments as needed for the mapping control is one pattern that can be used for physically placing survey control throughout the project. Another would be systematic planning of control points that are easily accessible for a variety of different projects.
Therefore, the survey control network is the framework for the entire project. It will only be as accurate as the control survey in which it is based.
Survey control can be completed using target-based registration to align scans to a survey control network. In order to do this, you need a minimum of three matching pairs of targets and two overlapping scans.
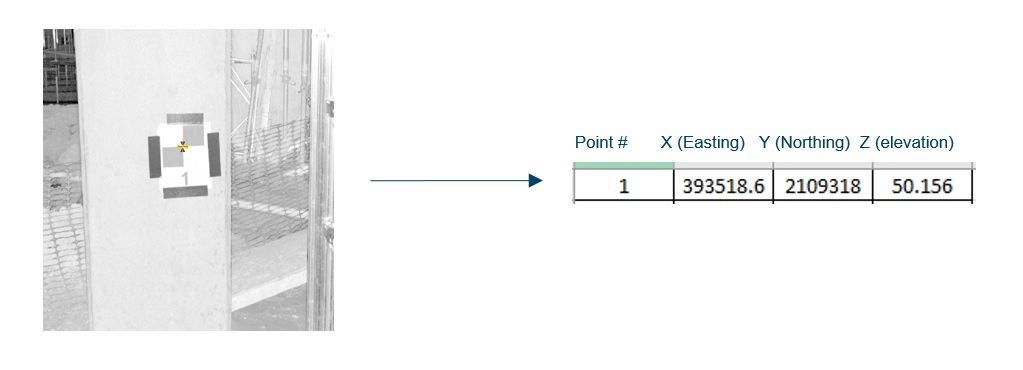
Credit: FARO webinar
An example of survey control using target-based registration.
For example, looking at Figure 5 above, you will scan the on-site checkerboards that that the surveyor hung up. The surveyor has shot the center of that checkerboard target in the coordinate system that you want to move your scans to. On the right hand side of the figure, you will see the actual coordinates of the checkerboard after the survey. You need three of these matching pairs of targets like this, and we can move our scans to survey control.
Surveyors are also able to use cloud-to-clouds scans, then lock all the scans together, and move those using target-based registration to survey control. It is important to note that one result might give better accuracy than another. A third way to establish survey control is using individual scans independent of any other scans around. There is no need to align scans to each other if the scans can be moved to survey control individually. All you’ll need is three points.
No Survey Control?
What happens if you do not have any survey control? This might occur if you do not have access to a surveyor, or maybe another situation might be when you went out and surveyed a pipe, there were no checkerboards up on site so there is no reference to transfer your scans to.
Let’s use an example where you have a BIM model. You went and scanned the project site, but there is no survey control. Luckily, it is possible to still use target-based registration; it just won’t be as accurate as having an actual surveyor out there establishing targets. But really, it is all about doing the best you can. So, all you have to do is look at the scans, look at the model, then find three pairs of points. You need a minimum of three pairs of corresponding point features in order to perform registration without survey control. You find a point that you can see in the scan that you’re also able to see in the model. Then you create three of these pairs and use target-based registration. In essence, it is a rotation in translation of scans, which is all target-based registration — or any registration — is.
This can be with either a 3D or 2D model. Using a 2D CAD model, if you can see three points in that scan, you are able to move your scans to the model. This is generally not as accurate as survey control, but it will get you pretty close.
