How to Determine Which Laser Scanning Registration Method is Right for You



Learning Objectives:
- Describe what registration is and the different registration methods.
- Distinguish between target-based registration and cloud-to-cloud registration.
- Identify what survey control is, understand how it’s established, and explain why it’s important.
- Determine how best to select a laser scanning registration method for any given project.
Credits:
As an IACET Accredited Provider, BNP Media offers IACET CEUs for its learning events that comply with the ANSI/IACET Continuing Education and Training Standard.
This course may qualify for continuing education through the FBPE.
This course may qualify for continuing education through the NYSED. For further information, please visit the NYSED website at http://www.op.nysed.gov/prof/pels/peceques.htm.
Purpose statement:
This course will review topics such as laser scanner accuracy, error propagation, survey control, and more when deciding on a laser scanning registration approach.Technology has evolved at a rapid pace over the last few decades. One industry that has profited greatly from this technological transition is the construction industry particularly when it comes to employing the skills of land surveyors and geospatial professionals on construction sites.
Technological advancements such as mobile apps (and smartphones), autonomous vehicles and heavy equipment, drones/UAVs, robots, augmented reality, and mobile mapping, have helped drive the surveying profession forward, making construction sites safer, data collection and processing more efficient, and businesses more successful.
One of the most prominent innovations to influence the surveying industry has been 3D laser scanning. Also known as 3D imaging, terrestrial LiDAR, and 3D imaging, laser scanning is becoming a more prominent service in everyday surveying. This is partially due to today’s user-friendly and feature-equipped laser scanners. Using these highly technical products, surveyors can calculate distances from hundreds of feet away, and measure angles, distances, and more without traveling to each individual point. Digitally capturing the shape of physical objects, 3D laser scanning uses a line of laser light to create point clouds of data of an object’s surface.
Although using reality capture solutions such as these can provide ample returns on investment almost immediately, they can also pose challenges in the field, specifically, choosing a registration method that is best suited for the project at hand.
As hardware and software manufacturers continue to develop enhancements in scanning registration and data collection technologies, it is important to understand the benefits and limitations of each method. This course will review topics such as laser scanner accuracy, error propagation, survey control, and more when deciding on a laser scanning registration approach.
What is Registration?
To start, we need to discuss what is laser scanning software, the basics of registration, and why it is important.
As we mentioned earlier, laser scanners deploy a technology called LiDAR (light detection and ranging), which involves collecting measurements using lasers to gauge distances between individual points. Terrestrial laser scanning has been used for various applications, including as-built modeling of architectural and engineering structures, mapping of terrain, vegetation, and other landscape features, and the measurement of movement caused by natural disasters. These scanners are able to record a dense array of distance return values, meaning millions of individualized measurements are made per second, which are then assembled into highly detailed, digital 3D models. These combine into what is commonly referred to as a point cloud.
When using terrestrial laser scanning, it’s possible to capture measurements of the environment that are visible from the laser scanners position, otherwise referred to as scanning within line of sight (LOS). Obstructions occur when objects in the environment block LOS from the scanner. To curtail this problem, multiple setups are used to extend LOS and ensure the required level of coverage for the project is achieved. So, in order to gain a complete image, surveyors need multiple scans and, potentially, many different point clouds. All of these scans must then be stitched together with an incredibly high level of precision and accuracy in a process called point cloud registration. Once the registered point cloud is in hand, 3D models and visualizations can be created using that data.
Registration is the first step in point cloud processing and 3D model conception. It is crucial for the overall quality of the final product because registration errors can easily propagate and multiply further in the process.
The registration process is the overarching alignment of scans to each other, based on a reference scan, or to a state or known coordinate system such as a BIM model. This means that the software either relies on the placing of physical ‘registration targets,’ placed in the field being scanned, or by finding patterns in features within a scan. Then, commonalities in scan overlaps have to be identified and aligned with adjacent scans.
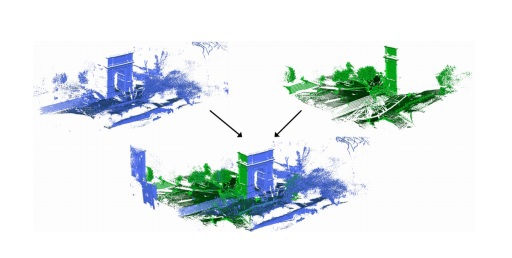
Source: P. W. Theiler, J. D. Wegner, and K. Schindler. Globally consistent registration of terrestrial laser scans via graph optimization.
ISPRS journal of photogrammetry and remote sensing, 109:126–138, 2015.
An example of registration of laser scans.
The traditional approach to registration requires two steps per point cloud. The first step is determining the correspondences, and the second is estimating the transformation. The correspondences can be geometric measurements like points, lines, planes, and even specific objects. For preparation, surveyors must detect the key points, fit the key lines, places, or extract the specific objects. Then, an extract can match those geometric measurements according to similarities. Alternatively, the geometric or adjacent relationship can be adopted to get correspondences. The second step is transformation estimation. Given the correspondences, the goal is to solve the transformation between two point clouds. This whole process can be achieved through a number of solutions using either one method or a combination. Those methods include: target-based registration, sensor-based registration, and data-driven, or cloud-to-cloud, registration.
Target-Based Method
The target-based method is the most common method used to register point clouds together. It uses artificial targets, or points and planes extracted from scan points, to align scans. These targets can be patterned, such as a black and white checkerboard, or a reo-reflective dot, or they can be geometric objects, like spheres of known dimensions. They can also be a combination of the two. Scanning in the middle of these objects provides a set of collective observed points that will be used to align the scans together. Only matched targets are used in registration, with a minimum of three targets required to do so. Though three is the minimum, the greater the amount of artificial targets, the better chance the processing software has of correctly aligning the scan data.
There is some geometry you have to pay attention to when working with targets. For starters, it is important to note that the targets should not be placed symmetrically around the scanner or aligned horizontally. They should be placed at differing distances and elevations from the scanner. Make it a point to make sure they are spread out enough. Scanner-to-target distance should also be taken into account as well as the angle of laser incidence. This may mean you need a second person scanning with you: one person to handle the scanning itself while another moves the checkerboards and spheres. However, once you get this process down, target-based registration is always going to work for you.
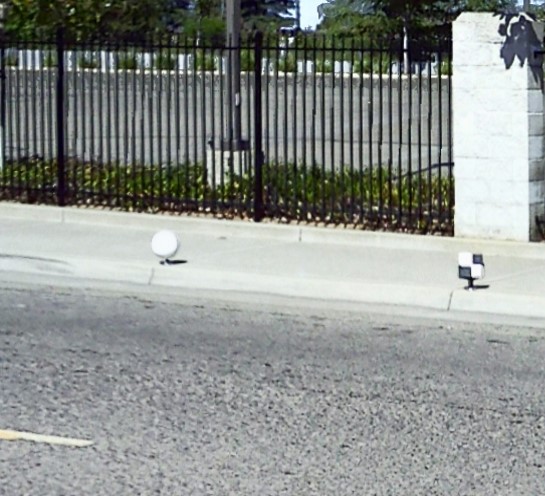
Credit: FARO webinar
An example of points used in target-based registration.
Another thing to take into account is the importance of being aware of the environment in which you’ll be scanning. For example, if you are scanning a tunnel, all the scans will look somewhat identical because it is a circular shape of concrete all the way down and all the way back. This will directly affect the accuracy of the impending registration. This would also apply to streets and roads, as they have repeating geometries similar to that of a tunnel.
Another example of an environment in which target-based registration would be the only option is an open pit mine used for excavation and mining. It is a very wide open space with nothing but rock and soil. Unlike the roads and tunnels, there is very little geometry. Cloud-to-cloud wouldn’t work in an environment such as this because, even if you use overlapping scans, there’s very little detail or significance in the overlapping area. So even though it might give you some sort of result, it won’t be accurate.
In conclusion, surveyors should know that targets are always going to work, no matter the environment. Once the process is completed a couple times, you will understand where to place targets, how far away from the scanner, etc., and you will be able to get repeatable, predictable registration results. Not only that, but you will get successful registration when using targets. Also, the target-based method gives predictable registration success with fast processing times because you are only tracking a few points. However, it can be time-consuming for surveying professionals to plan and place the targets as well as survey them. It is important to note that some environments will only work using target-based registration; however, all environments are conducive to work with the target-based method.
Sensor-Based Method
The sensor-based registration method uses information from sensors to provide either an initial global or relative position for registration. The Global Navigation Satellite Systems (GNSS) receiver is an example of this form of sensor that can be used to gain a position. However, this can’t be used inside buildings. For work inside closer corridors, an Inertial Measurement Unit (IMU) can provide rough relative position between scans. As defined, these electronic devices measure and report a body’s specific force, angular rate, and sometimes the orientation of the body.
Data-Driven/Cloud-to-Cloud Method
The data-driven registration method, or cloud-to-cloud method as we will call it, uses features and scan points in the overlap area of scans for alignment. The benefit of this form of registration is that it may be more accurate than target-based in some cases because, as we just learned, target-based is only using maybe three points at a time. Also, targets move. Maybe a checkerboard slides down a wall or someone accidently kicks or touches a sphere. Cloud-to-cloud is using a couple million points in the overlap, which equates to more data to look at and more data available to do a complete alignment of one scan from the next. So, in that sense, cloud-to-cloud’s benefit is that it is target-less, meaning that the process is fully automated and removes the need to select targets. However, this means that hundreds of thousands of scan points may be used, which also means longer processing times.
Unlike target-based, some environments will not work using cloud-to-cloud registration. As we mentioned, settings with repeating geometries like tunnels and roads, as well as environments with no geometry, like an open pit or a rocky plain, won’t work for cloud-to-cloud registration. Duane Doucet, senior technical engineer in construction BIM at FARO Technologies, explained in a webinar, “As you’re moving from one scan position to the next, the geometry is almost identical, which means there’s a slim chance cloud-to-cloud registration is going to work.” Because cloud-to-cloud is looking at the overlap of two scans and trying to figure out how to align them, it is not going to be able to understand or know how to do that in a tunnel.
One thing to note is that, in larger projects of around 1,000 scans, it is common to use both target-based and cloud-to-cloud using clusters. Whether the scan registration is completed using the target-based method, goes target-less with cloud-to-cloud, or uses a combination of the two, it is vital that the final registered data be sufficiently checked to guarantee close alignment to real-world conditions. Error propagation can occur from scan-to-scan, and measurements must be checked in order to prove final accuracies.
